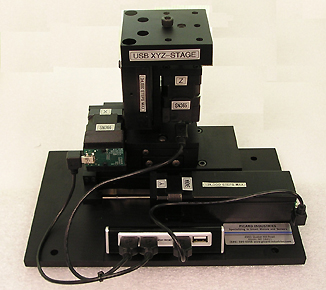
Introducing the USB 4D Stage
The USB 4D-Stage is a motorized precision motion control system used with the OpenSpim system. It is powered and controlled solely with USB ports. This system provides the method of automated control unmatched in size, simplicity, and ease of use. The USB 4D-Stage application software runs on any standard PC with Windows-XP (or higher) with a USB 2.0 port. This user interface provides for velocity (step speed), and positional (step) control. All linear position movements are relative to the home (fully retracted) position. A built-in magnetic (Hall) sensor is used to establish this home position.
- Compact four dimensional (X, Y, Z, R) Stage.

- Draws power from a standard USB port with use of a externally powered USB 4-port Hub.
- Fully self-contained miniature (Size-8) stepper motors, with integrated control electronics.
- Linear (X, Y, Z) range of about 9 mm (~0.35”).
- Linear slides have friction locks for transport.
- Positional resolution of 1.5 microns (0.00006”).
- Rotational resolution of 200 step/rev (1.8 deg).
- Includes Sample-Arm with pulleys and belt to hold and rotate the Sample-Tube.
- Power efficient, holds position with no power.
- Built-in magnetic (Hall effect) home sensor on the linear (X, Y, and Z) motors.
- PC Windows based user interface included for easy “out of the box” motion control.
- Dynamic Linkable Library (DLL) included for custom automated application.
USB 4D Software

The software operates on any standard PC with a Windows-XP (or higher) operating system that has a USB port. After the software has been successfully loaded, simply click the 4D-Stage icon on the desktop. The software will auto-detect the connections and display the Status of each axis and if properly connected, allow you to begin controlling the position of the Sample-Arm immediately.
To be properly connected, the 4-port USB Hub will need to be connected to an AC power source and its USB cable connected to the PC’s USB port. The serial numbers and other motor operating parameters may need to be entered. This is accomplished by clicking the “Change Parameter” button. Upon a successful initial connection the linear (X, Y, and Z) motor should be Homed by clicking the “All Home” button, after which they can be moved to the desired positions.
 The Parameter screen is used to set each of the motor’s serial numbers so that the application knows which motor to control for each axis. Other motor control parameters like speed and jog distance are also set in this screen. Once set, they will be saved and will remain even after closing and reopening the application.
The Parameter screen is used to set each of the motor’s serial numbers so that the application knows which motor to control for each axis. Other motor control parameters like speed and jog distance are also set in this screen. Once set, they will be saved and will remain even after closing and reopening the application.